見えないカメラ(ウエハレベルピンホールカメラモジュール)の応用の、Human-Machine-Interfaceの原理は、SEセンサが動きベクトルモードだと背景の静止画が消えますので、指先の空間座標位置が簡単な演算で求まります。動きベクトルのドットは複数画素で構成しますので、ピンホールカメラの欠点である低感度をカバーします。また動きベクトル画像ですので解像度の要求レベルも下がり、SEセンサの動きベクトルモードとの相性が良くなります。
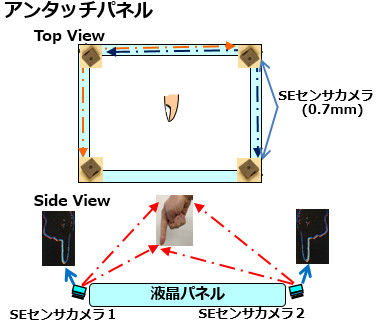
明るい所でしか使えない制限が有りますが、液晶モニターの前面は液晶のバックライトで明るくなっています。サイズが小さいので、配置の場所の制約が少なくなります。液晶モニターの4隅に配置するとアンタッチパネルになり、駅の券売機や銀行のATMのように画面にタッチするストレスから開放されます。(潔癖症の方に朗報!?)、ピンホールカメラは何処でもピントが合い、指紋センサとして使用できるかもしれません。
高齢化社会の進行と共に、高齢者の意思疎通が重要となり、Human-Machine-Interfaceのツールが有ることで、言語表現が不自由になり意志表示が困難になっても、体(例えば指先)の動きで意思伝達をしたり可能になります。
また体の動きの輪郭画像(動きベクトル画像)をスポーツゲームに活用し、体力の低下を防止できます。
バーチャルリアリティーゲーム(HMDを装着)を使ったリハビリ(ゲームリハビリ)では、可動範囲の不足分を補正することでゲームが楽しめます。こうすると発病・ケガのリハビリがゲーム感覚で行え、楽しいリハビリになります。この補正係数はリハビリの回復度の定量的な目安になり、より定量化されたリハビリになるという副産物も有ります。リハビリが楽しく退院しなくなるのも困りますが(笑)。
藤沢市のロボット産業推進事業補助金に、”ロボットのHuman-Machine-Interface向け要素技術開発”と題して3年連続で採択され開発を進めました。如何にカメラから出力される情報量を減らして、必要最小限な情報を出して後段の処理を減らすか。を研究しています。