
技術
国内登録(特許第6051399号)され、米国でも特許が登録(US10157945)されたウエハレベルピンホールカメラの概略に付きご紹介します。これはレンズレスカメラで、超小型、安価なカメラを提供します。サイズは1mm以下を狙い、(小さ過ぎて目に)”見えないカメラ”です。
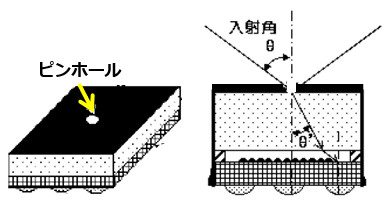
製造工程は下記のようになっています。まずイメージセンサウエハの表面にカバーガラスウエハを貼り合わせます。次にイメージセンサウエハの裏面より薄くし、表面の電極目がけてイメージセンサウエハの裏面より貫通孔(TSV;Through Silicon Via)を開けます。貫通孔を経由してイメージセンサウエハ裏面には表面の電極と繋がった配線を形成し、配線には半田ボールを搭載します。この際、ガラスウエハ表面には遮光膜を形成し、遮光膜にはイメージセンサと位置あわせをしたピンホールを開けておきます。最後にイメージセンサをカバーガラスと共に個片化することで、ピンホールカメラモジュールが形成されます。
このウエハレベルピンホールカメラモジュールの利点は、レンズが無いのでピント合わせが不要なことです。ピンホールカメラの特長である何処でもピントが合うカメラが簡単に実現でき、非常に小型で安価なカメラが製作が出来ます。一辺が0.7mmのイメージセンサ(血管内視鏡用センサ)で、カバーガラスの厚さも0.7mmでは、何と重さは1mgr!しかなく、世界最軽量のカメラモジュールが実現します。さらにピンホールを2つ以上開けると近距離の距離センサになります。 このピンホールカメラモジュールの問題点は、感度が低いこと、解像度が悪いことです。高感度、高解像度は通常のカメラの得意分野ですのでそちらに任せます。
このウエハレベルピンホールカメラモジュールの応用は、低ストレスカメラ、動きスイッチ、動きベクトル、指紋認証、Human-Machine-Interface、距離センサがあります。この内Human-Machine-Interfaceは、SEセンサが動きベクトルモードだと背景の静止画が消えますので、指先の空間座標位置が簡単な演算で求まります。
明るい所でしか使えない制限が有りますが、サイズが余りにも小さい(見えない)ので、撮られているストレスも有りません。逆に何処で撮られているか分からないというストレスに対しては、ピンホールカメラの欠点である低解像度、低感度(綺麗に見えない)であることが、かえって利点(低ストレス)になるかもしれません。
尚、本コンセプトはSEセンサ同様物は出来ていません。但しTSV工程は一般的になってきており、SEセンサ開発と共に試作をしたいアイテムです。

目に見えないカメラ(ウエハレベルピンホールカメラ)は大きさが1mm以下(血管内視鏡用TSVチップを使用すると;0.7mm角)と目に見えずカメラの存在感の低ストレスになります。また感度対策でピンホールを大きくすると低解像度(ピンボケ状態)になり、それがかえって高精細なカメラで見られていないという安心感から、ストレス低減に役立ちます。このことから”見えないカメラ”とは、(小さすぎて)見えないカメラ以外に、(綺麗に)見えないカメラ(ピンボケカメラ)の意味もあります。
介護の現場では”目障りなカメラで何時もくっきりと見られている!というストレスからカメラを外されてしまう。”という切実な声を聞きました。ピンボケ画像でもどのような状態かは分かるので、見えないカメラの特長である;①0.7mm角と存在感が無く、②ピンボケカメラは、介護現場での各部屋でのモニターとして相応しいと思います。画が出ないセンサ(SEセンサ);常には見てないカメラで、見えないカメラ(ピンホールカメラ)を製作すると、指定場所での動きが有った時だけピンボケ画像(綺麗に見えない)を出すことでモニターされる側にとって低ストレスなカメラになることが期待されます。
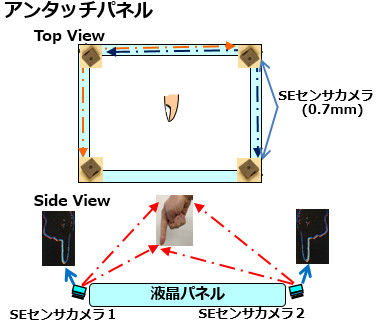
見えないカメラ(ウエハレベルピンホールカメラモジュール)の応用の、Human-Machine-Interfaceの原理は、SEセンサが動きベクトルモードだと背景の静止画が消えますので、指先の空間座標位置が簡単な演算で求まります。動きベクトルのドットは複数画素で構成しますので、ピンホールカメラの欠点である低感度をカバーします。また動きベクトル画像ですので解像度の要求レベルも下がり、SEセンサの動きベクトルモードとの相性が良くなります。
明るい所でしか使えない制限が有りますが、液晶モニターの前面は液晶のバックライトで明るくなっています。サイズが小さいので、配置の場所の制約が少なくなります。液晶モニターの4隅に配置するとアンタッチパネルになり、駅の券売機や銀行のATMのように画面にタッチするストレスから開放されます。(潔癖症の方に朗報!?)、ピンホールカメラは何処でもピントが合い、指紋センサとして使用できるかもしれません。
高齢化社会の進行と共に、高齢者の意思疎通が重要となり、Human-Machine-Interfaceのツールが有ることで、言語表現が不自由になり意志表示が困難になっても、体(例えば指先)の動きで意思伝達をしたり可能になります。
また体の動きの輪郭画像(動きベクトル画像)をスポーツゲームに活用し、体力の低下を防止できます。
バーチャルリアリティーゲーム(HMDを装着)を使ったリハビリ(ゲームリハビリ)では、可動範囲の不足分を補正することでゲームが楽しめます。こうすると発病・ケガのリハビリがゲーム感覚で行え、楽しいリハビリになります。この補正係数はリハビリの回復度の定量的な目安になり、より定量化されたリハビリになるという副産物も有ります。リハビリが楽しく退院しなくなるのも困りますが(笑)。
藤沢市のロボット産業推進事業補助金に、”ロボットのHuman-Machine-Interface向け要素技術開発”と題して3年連続で採択され開発を進めました。如何にカメラから出力される情報量を減らして、必要最小限な情報を出して後段の処理を減らすか。を研究しています。