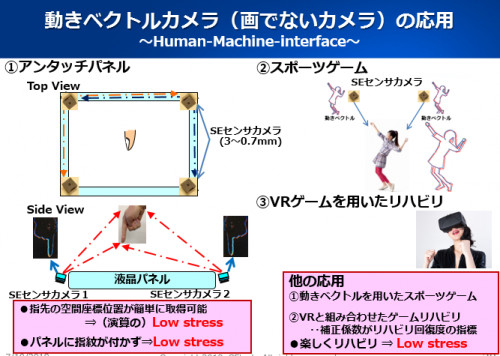
動きベクトルカメラ(画がないカメラ)の応用としては、Human-Machine-Interfaceへの応用が有ります。パネルの4墨に配置し指先の空間座標位置が容易に求まり、アンタッチパネルが実現します。また動いている体の輪郭も捉えられますのでスポーツゲームや、VRと組み合わせたゲームリハビリの応用が有ります。リハビリ中では稼動範囲が制約されるため、そのままではゲームが楽しめません。実際の稼動範囲に補正を掛け、VR上では稼動範囲が確保されゲームが楽しめるようになります。この際に重要なのはこの補正係数がリハビリの回復度になることです。リハビリの回復度の定量化ができ、ゲーム感覚でリハビリが楽しめます。回復度が定量化されて、楽しみながら(楽しすぎて退院しないと困りますが)リハビリができるので、リハビリ期間の短縮になり、健康長寿に貢献出来るのでは?と夢見ています。
動き情報撮像装置が特許登録(特許第7025073号)されました。
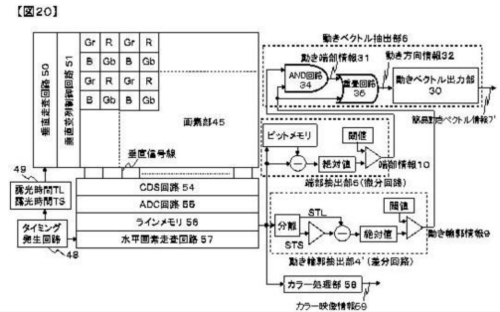
動き情報撮像装置とは動き輪郭情報から簡単な演算で、動きの方向や動きの速度を取得する方法に関する特許です。この簡単な演算とは差分信号、微分信号の論理積と論理和を取るだけなので、イメージセンサから直接動きベクトルの出力が可能になります。この回路図を添付図に示します。
露光時間の異なる一対の画素差分を取得し、静止画では差分出力がゼロになるように調整すると、動体の輪郭部分のみ差分出力が得られます。更に微分出力も取得し、差分情報と微分情報の論理和。論理積を取得すると動きベクトル情報が得られます。
従来この動きベクトルの取得は、イメージセンサから出力される膨大な情報量の画像情報を、リアルタイムで高速演算することが必要になり(動線取得難)、膨大な電力が必要でした(カメラ開発会社社長談)。
今回の特許では上流側(イメージセンサ側)で、画素差分情報を基に動き情報を抽出し、この情報を基に論理和や論理積で動きベクトル情報を抽出しますので、イメージセンサ駆動+αの消費電力で、動きベクトル情報取得が可能(動線取得容易)となります。
この動き情報カメラ(センサ)は画素ブロック(例えば;10×10画素)の平均値で差分を取り、露光時間の異なる画素は隣接しています。このため虫の目の欠点であった、低感度・低解像度の問題は解消できます。(感度は100画素分の感度となります)
Human-Machine-Interface応用では、解像度も低くて済みます。文字通り、”無視の目”(動きベクトル)センサを用いると、”虫の目”の欠点の解消が出来ます。本知財も、優遇制度が有るPCT(国際出願)で、独力で手続きをしました。
R4.4.1にPCT出願手数料が(送付手数料;1→1.7万円、調査手数料;7→14.3万円)改定されており、早めに手掛けておけばと悔やまれる。但し7.1からは更に国際出願手数料が15.95→17.9万円に改定されるので、これに間に合っただけでも良いか?。中小ベンチャーは1/3になる減免制度があり、ダメージは少ないが。
未だSEセンサは出来ていませんが、SEセンサより直接出力を目論んでいる動きベクトルにつき説明します。これはカメラからの出力が画像でなく動きベクトルですので、”画がない”カメラと命名し、カテゴリーを変えました。見てないカメラとも称し、画像はないので低ストレスです。
画素ブロック毎に動き判定を行いますが、動きが無ければ画像出力がゼロになり、動きの輪郭のみ出力がされることから、動きベクトルが簡単なアルゴリズムで所得できます。
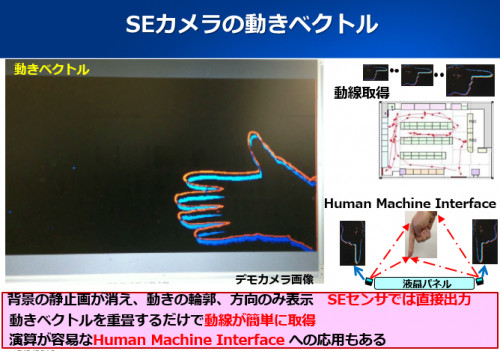
図は動きベクトルのデモ画像ですが、背景の静止画が消え、動きの方向が色で、スピードが幅で表示されます。動きベクトルを重畳するだけで動線が簡単に求まり、動線取得が容易になります。パネルの4隅に配置することで指先の空間座標位置が三角測量の原理で簡単に求まります。従来、カメラ画像から出力される画像から動線を取得するには、リアルタイム高速演算が必要で動線取得が困難でした。センサから動きベクトルが直接取得でき、重畳するだけで動線が取得できると、動線管理が簡単になります。
これはHuman-Machine-Interfaceへの応用分野が有ります。見えないカメラ(ピンホールカメラ)では何処でもピントが合いますので相性が良く、タッチパネルのように
パネル表面が汚れることなく、また指先も非接触なので清潔感が有ります。
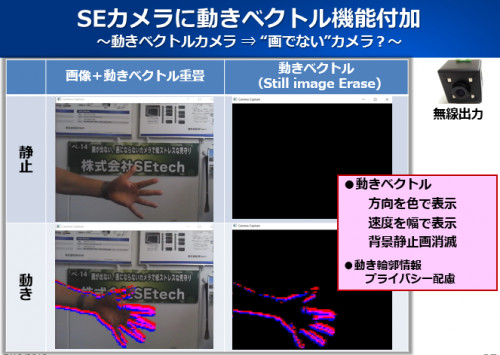
SEカメラを改造し動きベクトルカメラを試作しました。動きの輪郭のみ表示され、方向を色で速度を幅で表示します。
Dipスイッチの切り替えで、元画像に動きベクトルを重畳させ表示させるモードと、動きベクトルのみを表示させるモードが選べます。
背景の静止画が消え、動きの輪郭のみが表示されると情報量が減り、Human-Machine-Interfaceへの応用が拓けると考えています。
この開発費用として令和元年度の藤沢市ロボット産業推進事業補助金に、平成30年度に引き続き採択されました。