見てないカメラの説明をします。見てないカメラは無視の目カメラとし、虫の目の分類に入れます。
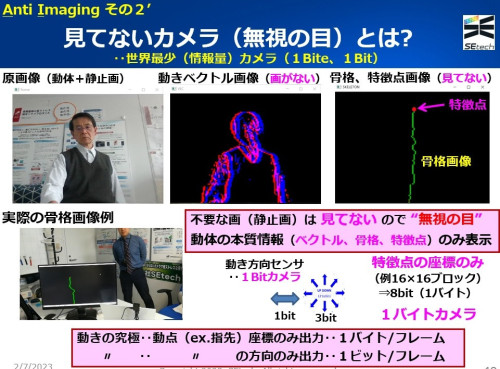
添付の画像は、原画像、動きベクトル画像(画がない)、骨格・特徴点画像(見てない)を列挙しています。原画像の内、動画だけに注目し、動体の輪郭と動きの方向を動きベクトル画像で表示し、動体の骨格と、特徴点を骨格特徴点画像として表示しています。動きベクトルでは静止画を消し、動体も輪郭しか残していませんので、”静止画、動画”を無くしており、”画がない”状態です。
更に、動体の輪郭すら消している骨格・特徴点画像は、原画像を”見てない”状態になり、特徴点の座標だけですと、16×16ブロックでは8bit(1バイト/フレーム)となり、動き方向センサとして方向のみ出力すると、左右だけなら1ビット/フレームの情報量になり、文字通り世界最少(情報量)カメラを提供できます。
無視の目を虫の目で提供しますと、世界最少カメラを世界最小カメラで提供できることになります。語呂合わせとしても面白いですね!
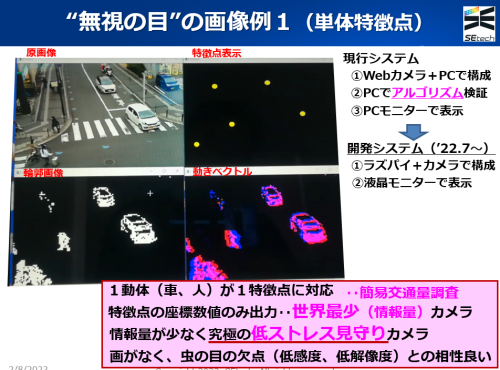
見てないカメラ画像例です。1動体に1点(特徴点)が対応します(単体特徴点と称す)。
原画像、輪郭画像、動きベクトル画像と特徴点表示画像を示します。特徴点の数が動体(車、バイク、歩行者)の数に相当しますので、簡易交通量調査カメラになります。
画でなく、解像度は要求しませんので、虫の目の欠点である低解像度はクリアし、
複数画素で輪郭画像を処理することで、虫の目の別の欠点である低感度もクリアします。
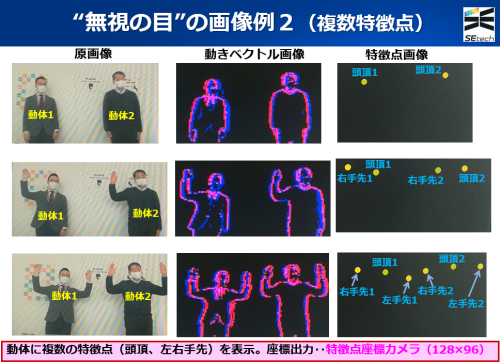
見てないカメラの別の画像例です。1動体に複数の特徴点(頭頂、手の先)が対応します(複数特徴点と称す)。
原画像、動きベクトル画像と特徴点表示画像を示します。頭の先端、手の先といった個所が特徴点になります。
これらの画素差分で得られた輪郭情報からの骨格・特徴点の取得アルゴリズム・フローチャートは、老脳に鞭打って?作成しました。