
インフォメーション
単純な構成のシステムですが、敢えてスマートと付記したのは下記の幾つかの特徴を有するからです。
①前述しました様に、生育環境に最適の間隔(根が張る直径?)で最稠密植栽(正三角形)が可能となりますので、正方形に比べ生産性が上がります(15%)。足やタイヤを入れるスペースが不要(従来の稲作では株間=1.5×条間)となるので更に生産性が上がります(1.5倍?)。米国の様に大規模農業装置(初期投資が膨大)が導入できれば、トラクター幅に比べ作業ユニットの幅を広く取ることができ、生産性改善が可能ですが、タイヤのスペース割合が減っていき、究極は地に足を付けない農業になります。足やタイヤが入りませんので、外部から雑菌(例えが違いますが、鳥インフルエンザの様な病原菌)の持ち込みが抑えられます。
②上方から個々対応(何列目・何回転目)で農作業を行う事で、ピンポイント消毒しソーティング収穫を行なえば、同じ畑で農薬、無農薬が共存し、付加価値を上げられます。(ドローンでの農薬散布は個々対応ではなく領域対応になります。)
③レール(乾燥路面)上を移動する為、省エネになり、スリップが無く位置が正確(何回転目)です。また移動ユニットの動力源として、中古の住宅用ソーラーパネルを使えば、CO2削減に寄与し輸入燃料高騰対策にもなりますし、そもそも動力費が不要(省エネ)になります。住宅用ソーラーパネルは2030年代後半には、50~60万トン/年が破棄されると見込まれているそうで、再利用に寄与出来たら良いですね。移動にはパワーが要りますが、農薬散布のドローンとは違って保持にパワーが要りませんので、省エネになります。
④支柱とレールはビニールシートの様な農業用部材の保持にも使え、敷設は農業用ロボットが自ら行います(人が立ち入れないので)。農業用部材としては防虫ネットや光学フィルムも有り、温室、防虫、防鳥の目的以外に、農地端部にロボット or 人手で壁を設けることで防獣、防風の対策(異常気象対策)にも繋がります。
レールにぶら下げて棚を形成することも可能で、葡萄やキーウイの棚を形成することも出来ますね(但し棚の高さは作業ユニットの底部より下で、移動の度に作業ツールを、棚に干渉しないように引き上げる必要があります。果実は棚付近にできるので、作業ツールの伸縮は短くて済みます)。またイチゴやトマト栽培ですと、作業ツールの通る幅だけ隙間(通常の水耕栽培で人が通る幅より狭い)を開けて、同一敷地内に露地栽培と水耕栽培を積層させ、更に収率を向上する形態をとることも考えられます。(水耕栽培の下にLED照明を付け、露地栽培の照明も可。この構造では作業ツールの伸縮は長くなる)。
更には光学フィルムにソーラー機能(生育の日照を妨げないストライプ状のソーラー部材;例えばペロブスカイト太陽電池では、樹脂基板上に液体を塗り焼いて作り、重さが1/10になり、変換効率は10~20%もあるそうです)があれば、日本の農地430万haがソーラーの候補地(設置場所に悩む必要が無い)に化け、大幅な脱炭素社会の実現が期待されます。(発電効率が現行の1/20でも原発35基と、日本の原発数33基をカバーし脱原発!で、使用済みの燃料の処分にも困らず、ミサイルの標的?にもなりません)
本日(2023.5.31)たまたまペロブスカイト太陽電池の発電効率改善の記事が日本経済新聞に掲載されていました。
ペロブスカイト型太陽電池、発電効率高める材料 京都大 - 日本経済新聞 (nikkei.com)
本日(2023.6.5)の日本経済新聞にも、貼る太陽光発電としてペロブスカイト型が紹介されていました。農地にソーラーの大きな市場を見出し、量産は日本としたいですね。
貼る太陽光発電、覇権争い 日本発の技術でも量産は中国 - 日本経済新聞 (nikkei.com)
今までの所で、農地の付加価値向上、生産性向上、燃料費高騰対策、中古ソーラーパネルの有効活用、異常気象対策、脱炭素、脱原発、農業省人化、経済安保?と盛り沢山ですが、農業用ロボットの特徴の続きはまだ有り、長くなるので残りは翌月に回します。
弊社プレゼンとしては、先月ご紹介した”4つの目”とは少し毛色が異なりますが、⑤として農業用ロボットのコンセプト提案を追加するケースも有ります。これは”地に足を付けない農業ロボット”のことです。
発想は「農作物の植栽パターンを最稠密(斜面にあるパチンコ玉配置)にし、収穫量を15%アップさせる」ことが切っ掛けです。最稠密植栽は着想は早かったものの、起業のバタバタで出願が遅れ、既に特許出願済(特許第6243497号)でした(泣)。最稠密植栽のため足(タイヤ)を踏み入れるスペースが無くなり、このためには”地に足を付けない農業ロボット”が必要になるので、こちらで2件の特許登録に漕ぎ付けました。
最稠密植栽が普及しますと、日本の農地の原風景は直交した格子状ではなくなり、斜め60度の三角形状になります(日本の農地の原風景が変わるかもしれませんネ?)。
”地に足を付けない”という響きはマイナスイメージに捉えられてしまう懸念が有りますので、補助金応募(@2022年)を切っ掛けに、今回プレゼンの際に「スマート農業への提案」と名前を変えさせて頂きました。農業用ロボットそのものは目とは異質ですが、個々の農作物の画像情報を農業用ロボットの目(カメラ)で見て、個々対応で農作業を行うという特徴を有します。
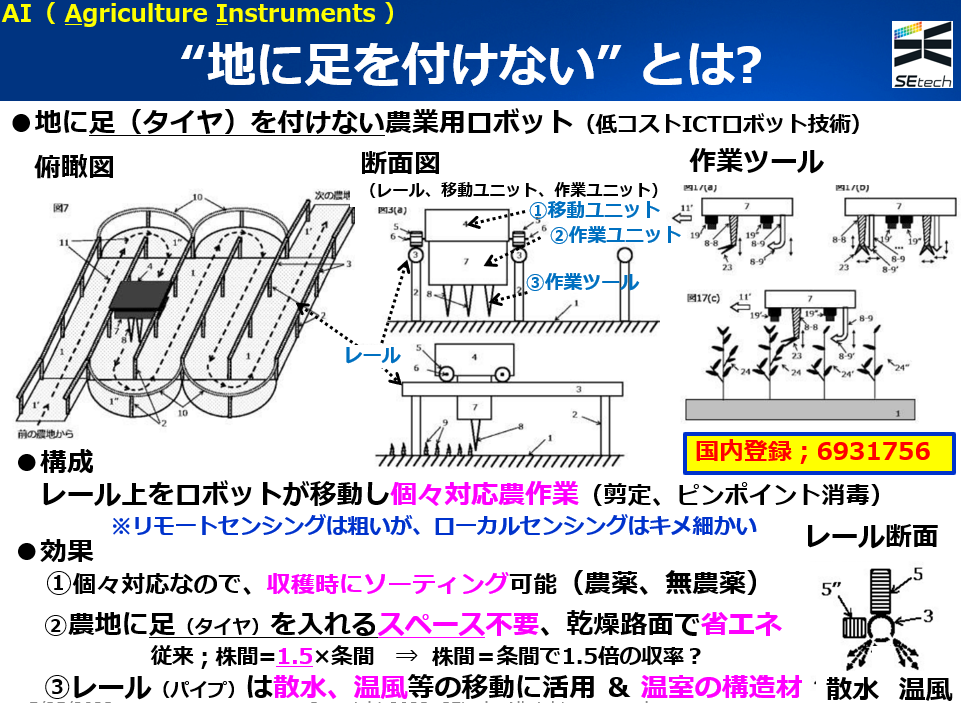
提案している農業用ロボットは「農地の上に支柱を立て、その上に這わせたレール上を農業用ロボットが移動する」という単純なもので、農業用ロボットは移動ユニット、作業ユニット、作業ツールで構成されます。農業用ロボットのカメラの画像情報を用い、上方から農作物に対して(作業ツールの位置を変えながら)一連の農作業を個々対応で行います。一連の農作業とは、穴掘り・施肥・種蒔き・土被せ or 田植え~水撒き・消毒・剪定・雑草取り~収穫or刈り取り・脱穀・稲穂のすき込み、と全ての農作業のことを言います。
各農作業に応じて作業ツールを変更し、作業部分の高さを変化させ農作業を行います。作業ユニットは変える場合も有りますが、移動ユニットは共通です。農地の上方に設置したレール上を移動しますので、地に足を付けない農業になります。農地に足を付けているのは、支柱だけで面積的には僅かです。