
インフォメーション
イノベーション・リーダーズ・サミット2023(11/29~12/7@虎ノ門ヒルズ)にNEDOより推薦されました。リンク先は右記(1日目のNEDOドリームピッチ)です。ILS
ILS2022と同様に、パワーマッチングはオンラインで参加予定ですが、虎ノ門ヒルズメインホールで開催されるNEDOドリームピッチ(12/4(月)15:00~15:45)はオンラインでなく、リアル(Live配信もある)で、5分間のピッチプレゼン予定です。(5分と短いので、早口と噛まない練習しています。)
タイトルは「AI(Anti-Imaging)カメラを用い、AIの負荷軽減」とし、虫の目(世界最小カメラ)と無視の目(世界最少カメラ)の話をする予定です。イノベーションという言葉が有るので、「チマチマしたマッチング」や、「(イノベーション)を使って‥」の話より、「イノベーションを作って‥」みたいにスケールが大きくて良いか?。久しぶりのリアルのプレゼンなので反応が見えて楽しみです。
因みに、ドリームピッチの案内には、「NEDOが厳選した、AI/制御、IoTデバイス/ICT/アプリ、サービス/プラットフォーム、モビリティ、ロボティックス分野における次世代のテクノロジーを有するスタートアップ7社がピッチを行います。」との表現が有りました。こんな錚々たる企業と一緒に登壇できるとは!。
HP開設より7年が経過しました。累計アクセス数は本日現在;457,600件を超えました。ここ1年間では月平均7,200件のアクセス数です。多くのアクセスを頂き感謝申し上げます。HPの開設以来、毎月(85ヶ月連続で)インフォメーションを更新しておりますが、更に充実したHPを目指していきます。
8/23(水)に現在入居しているSFICはじめ、SFIC-2、SFC-IVの3拠点の入居者交流会が有りました。
入居企業自己・自社紹介の3分ピッチがありましたので、今回3分ものの紹介パワポ(計7枚)を作成しました。構成は、
1枚目‥自己紹介として名刺に写真と似顔絵を載せている。
2枚目‥似顔絵のパーツを分解し並べ直すとが名前になるアニメーション(顔と名前が一致する名刺!)。似顔絵と最も似ている写真が25年前のカラオケ時の写真(これを凌駕する写真が無い)この写真を使うために、老けられないので老脳に鞭打って?会社を設立(登録特許9件を有する知財ベンチャー)。
3枚目‥引き続き自社紹介として、名刺イラストレータ-でなく、3つの目(鳥の目、虫の目、魚の目)を手掛けている。
4枚目‥写真以外の起業の切っ掛けは監視カメラの数だけ分割されているモニター画像。前職(東芝)では長らく「画が出るイメージセンサ」を開発、イメージセンサから画が出るために画像表示が必要となり、カメラの台数だけ分割されストレスフルなモニター画像になる。この大いなる反省の元に、定年退職後は「画が出ないイメージセンサ」を出願し、登録されたのが、創業の別の切っ掛け。
5枚目‥沿革は、第一回かながわシニア起業家ビジネスコンテストで県知事賞を受賞(創業1.5年)し、これが切っ掛けで50回マスコミに掲載。例としては、週刊誌・Yahooニュースに「ヤメ東芝たちの挑戦」として掲載された。(定年退職なのにヤメ東芝?)展示会も17回全て無料で出展し、イノベーションジャパン2022では、AI・IoTの14社中、唯一本来のAIを行っていないAIベンチャーとして出展。
6枚目‥AIベンチャーと言っても、AI(Anti-Imaging)カメラ(3つの目)を手掛けている。3つの目とは鳥の目、魚の目、虫の目のことで、鳥の目、魚の目はNEDO-SUI補助金に採択(創業8ヶ月)され試作した。虫の目は世界最小カメラ、無視の目は世界最少カメラである。他にコロナ対策、農業用ロボットなども手掛けている。
7枚目‥SEtechは Senior Entrepreneur technology (シニア起業家の技術)でCreating Innovation(ビジョンは大きい!)を目指している。
というストーリー。
‥良くこれだけの分量が3分に収まったものだ。プレゼンの工夫としては、喋るスピードに同期してアニメーションが順次開いて行くので、レーザーポインターが不要で、アニメーションがペースメーカーになり、ピッタリ3分で収まる。話の流れのスムースさに密かに感心。今流行りのタイパが良い!。
これでプレゼンのバージョンとして、3分、10分、30分、70分が揃った!。
7/29は弊社の創業記念日で、起業してから何とか8年になりました。
プレゼン内容が確定してきたので、現役時代の職場を訪問し、70分のプレゼン(4つの目+スマート農業)をさせて頂きました(全112ページ)。‥退職後12年も経ってからプレゼンさせて貰うのも珍しい?、 前回のプレゼンは4年前でした。(数十人に聴講頂いたが、業務に支障が出たのでは?)。
でも事後アンケートを読むと、「刺激的なセミナーだった」、「貴重な体験となった」、「同じテーマで講演時間を延ばして再度聴講したい」、「ギャグが多く楽しく聞けたので、すんなり頭に入った」、「ユーモアを交えて分かり易かった」、「語呂合わせが凄い」、「大量の言葉遊びを見て、ideaの源泉はこれかと思った」、「笑いをこらえるのに必死だった」、「実体験も散りばめられ、イメージがし易かった」、「聴講者の心を惹きつけ、飽きさせないプレゼンの工夫を参考にしたい」、「とても楽しく興味深かった」、「情報量が多く、読み物としても面白い資料」、「全てのページが面白かった」、「夢を語る姿に希望をもらった」、「次回のセミナーが楽しみ」とか、多くの好意的な反応を頂き、プレゼンのし甲斐がありました!。主催者からも「来年も来てください」と言われたので、新たなネタを仕込まないと!
「もっとウケても良いのに?」と疑問を感じながらプレゼンをしていましたが、「声を出して笑うのは遠慮していたが、笑いをこらえるのに必死だった」とのコメントが有ったように、若手は「大先輩(年の差)のプレゼンに笑ってしまったら失礼に当たる」と(敬老精神を発揮し?)忖度してしまったようです。もっと我慢せず、素直に反応してくれたら、疑問を覚えずもっと伸び伸びとプレゼンが出来たのに。最初の段階で「年の差は気にせず、素直に笑ってください」とコメントをすれば良かったと反省しています。
現役時代の職場を訪問‥と似たような話は、国交省でもあるようで、こちらは国交省のOBが昔の上下関係を使い、業務の口利きだけでなく、Top人事にまで口を出すような話がマスコミを賑わせていました。やはり退職時には上下関係、権限・シガラミをリセットし、ゼロから付き合うようにしないと、長続きしないと思われます(上下関係の継続は、現役世代にはハタ迷惑)。リセットしてシガラミがゼロになってしまうと、付き合いが無くなるケースが大半ですが。
‥因みに今回プレゼンした資料の112ページ中、現役時代に関するものは、20年前の特許の紹介の1ページのみで、他はシガラミが無くなった退職後(創業後)作成したモノ。
聴講して頂いた若手メンバーと一緒に、来訪記念として写真を撮って頂きました。画像に載せたい所ではありますが、個人情報保護のシガラミが有り無理ですネ。
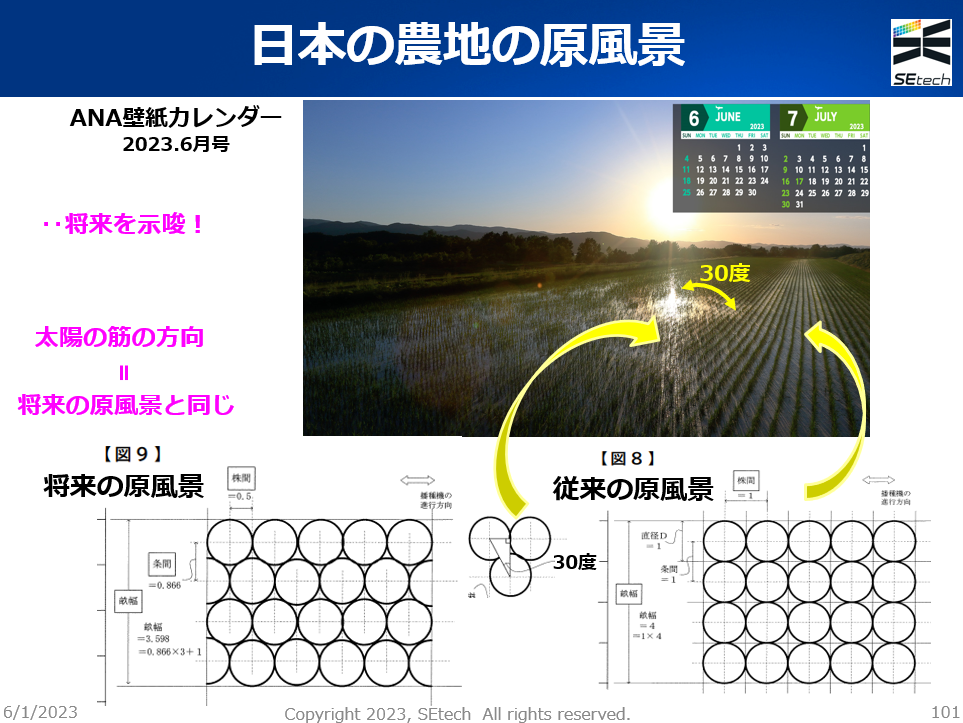
「技術」の「地に足を付けない農業」の「スマート化の確認」の個所でも触れましたが、「最稠密植栽になりますと、植栽方向は現行より30度傾いた方向になり、日本の農地の原風景が、将来変わるかもしれません。」と記載しました。
ANA壁紙カレンダーの6月号では、タマタマ?日本の農地の原風景の写真が使われていました。逆光で暗いので(HDRモードでは撮像していると思うが)、何か別のモノをと思っていましたら、逆光をもたらしている太陽の方向が、何と30度!傾いており、太陽の筋の方向が「将来の日本の農地の原風景」を示唆!していることにハタと気が付きました。早速、PCの壁紙と6月の2回のプレゼンに活用させて頂きました。(なお添付の植栽図面は特許公報6243497号からの抜粋。)
‥”ANAさん”貴重な壁紙の提供有難うございました。農業用ロボットの個所のHPリニューアル作業をタマタマ行っている最中だったので気が付いた(超ラッキー)。
「日本の農業の将来像」とタイトルに書きましたが、日本の農業の将来像は「この壁紙カレンダー画像」なのかも知れませんネ(笑)。
「日本の農業の将来像」を広めるべく、アグリテックグランプリ2023(リバネス主催)に応募していましたが、残念ながらグランプリデモデー(9/16実施)でプレゼンするファイナリストに選ばれませんでした(8月末連絡あり)。やはりモノが無くコンセプトだけではダメの様です。